一、技术突破:31关节自由度与1.8米仿生身高的协同设计
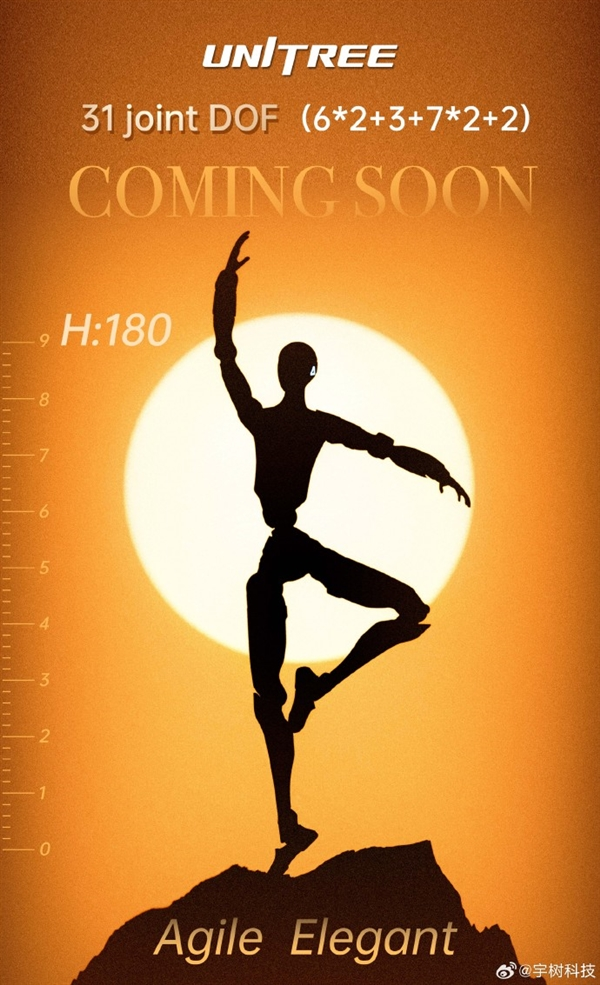
宇树科技此次发布的预告海报中,新款人形机器人以一记标准的芭蕾舞足尖动作引发关注。从官方披露的参数看,其核心亮点在于31个关节自由度(6×2+3+7×2+2)与1.8米类人身高的组合设计,这一配置在当前人形机器人领域处于领先地位。
1. 关节自由度的进阶意义
- 运动能力的质变:传统双足机器人的关节自由度通常在16-24个之间(如特斯拉Optimus为28个,但尚未量产),而宇树新款机器人通过**髋关节双六自由度(6×2)、腰椎三自由度(3)、肩部七自由度(7×2)及腕部双自由度(2)**的分布式设计,实现了更接近人类的灵活运动。例如,髋关节的高自由度可支持小步幅快速调整重心,腰椎关节则赋予躯干动态平衡能力,肩腕的七自由度结构能精准复现芭蕾舞中的”挥鞭转”等复杂手部轨迹。
- 模块化冗余设计:关节布局暗含功能分区逻辑——下肢侧重稳定性与爆发力(如6自由度髋关节可独立控制外展/内收、屈曲/伸展、旋内/旋外),上肢则强化精细操作(七自由度肩部允许手臂在三维空间中绕过障碍物)。这种设计既满足工业场景中搬运、装配的需求,也为舞蹈等艺术动作提供了冗余自由度。
2. 1.8米身高的战略考量
- 人机交互适配性:1.8米的身高接近成年男性平均体型(中国男性平均身高约1.7米),既便于在工业环境中与标准货架、设备交互,也能降低家庭用户对”矮小机器人”的心理隔阂。对比来看,波士顿动力Atlas身高1.5米,更偏向于敏捷性而非亲和力;而优必选Walker X虽为1.3米,但牺牲了部分操作范围。
- 动态稳定性挑战:更高的重心对平衡算法提出更高要求。宇树通过主动柔顺控制技术(结合力矩传感器与IMU惯性测量单元实时调整关节扭矩)和预测性步态规划(基于视觉/激光雷达预判地面不平度),确保机器人在跳跃、旋转时保持稳定。海报中芭蕾动作的完成,侧面印证了其在抗扰动动态平衡上的突破。
二、产品定位:从工业先行到家庭落地的渐进路径
尽管机器人展示出媲美人类的运动美学,但宇树科技创始人王兴兴在3月的采访中明确表示:”家用人形机器人至少还需两三年才能落地,工业端发展更快。”这一判断基于多重现实因素。
1. 工业场景的优先级优势
- 需求明确且容错率高:工厂流水线上的物料搬运、精密装配等任务对机器人的灵活性要求低于艺术表演,但对重复定位精度(±0.1mm级)和24小时持续作业能力更为看重。宇树现有产品(如Unitree H1)已在汽车零部件厂测试,其负载能力(约15kg)和抗电磁干扰设计更贴合工业需求。
- 成本回收周期短:工业客户愿意为效率提升支付溢价。据高工机器人研究院数据,一台人形机器人若替代3名工人(月薪合计约1.5万元),年节省人力成本超18万元,而当前高端人形机器人售价约50-100万元,随着供应链成熟(如国产谐波减速器价格下降40%),投资回收期可缩短至2-3年。
2. 家庭场景的三大瓶颈
- 安全性与伦理风险:家用机器人需长期与老人、儿童共处,任何机械故障(如夹手、跌倒)都可能引发严重后果。目前行业普遍采用**”物理限位+软件冗余”**方案(如限制关节最大扭矩、设置紧急制动按钮),但完全避免风险仍需时间验证。
- 个性化服务能力不足:家庭环境复杂多变(如宠物突然闯入、儿童玩具散落),机器人需具备多模态感知融合(视觉+语音+触觉)和自适应决策能力。例如,递一杯水给老人时,需根据其坐姿高度自动调整手腕角度,这类细节依赖海量场景数据训练。
- 用户接受度与性价比:消费者更倾向于为”解决痛点”的功能付费。调研显示,70%的家庭用户希望机器人优先具备扫地、做饭等实用技能,而非舞蹈表演。若基础功能未完善(如当前扫地机器人仍存在避障盲区),高价的”全能型”人形机器人恐难打开市场。
三、行业趋势:人形机器人的”敏捷+优雅”竞赛
宇树此次以”Agile(敏捷)””Elegant(优雅)”为关键词,折射出行业竞争焦点的演变——从单纯追求力量与负载,转向运动表现力与人性化交互的综合较量。
1. 国际巨头的差异化布局
- 波士顿动力Atlas:主打极限运动性能(如空翻、跑酷),但依赖液压驱动导致能耗高(每小时耗电约5kW)、维护复杂,更适合科研展示而非商业化。
- 特斯拉Optimus:聚焦通用人工智能(AGI)集成,计划通过Dojo超算训练神经网络,但其28个关节的自由度分配更偏重实用(下肢12个、上肢10个),舞蹈等精细动作尚未展示。
- 优必选Walker X:强调”服务型”定位,集成语音助手与物体识别功能,但在动态平衡性上弱于宇树(步速约0.5m/s,而宇树H1可达2m/s)。
2. 核心技术的下一个战场
- 轻量化与能效比:采用碳纤维骨架(密度仅为钢的1/4)和低功耗电机(如宇树自研的M107关节模组,峰值扭矩120N·m,效率达90%),可延长续航时间(目标从当前的2-3小时提升至8小时以上)。
- 触觉反馈与灵巧手:斯坦福大学研发的”电池驱动柔性手指”已能捏起鸡蛋,未来若集成到人形机器人手掌,将极大扩展其操作范围(如插拔插头、整理衣物)。
- 情感计算引擎:通过微表情识别(如嘴角上扬幅度判断情绪)和自适应对话系统,让机器人从”工具”升级为”伙伴”,这是家庭落地的关键一步。
四、未来展望:从实验室到客厅的”最后一公里”
宇树新款机器人的芭蕾预告,既是技术实力的炫技,更是对市场预期的管理——它清晰传递了一个信号:人形机器人正从”可行走”迈向”会表达”的新阶段。然而,要真正走进千家万户,仍需跨越以下门槛:
- 供应链成熟化:依赖进口的精密减速器(如日本哈默纳科)、力矩传感器需实现国产替代,以降低成本并保障供货稳定性。
- 标准体系建立:包括安全认证(如ISO 13482服务机器人安全标准)、数据隐私保护(防止用户语音/图像信息泄露)的行业规范亟待完善。
- 应用场景深耕:优先在养老陪护(如提醒服药、紧急呼叫)、教育辅助(如编程教学、科学实验演示)等刚需领域突破,积累用户信任后再扩展至全场景。
正如王兴兴所言:”机器人不会一夜之间取代人类,但会逐步成为生活的一部分。”当某天我们看到宇树的”芭蕾舞者”不仅能旋转跳跃,还能为老人端上一杯温水时,人形机器人的时代才算真正到来。